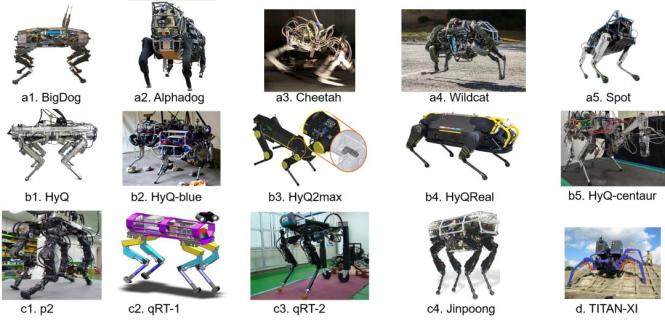
液压四足机器人元件与液压系统研究现状与发展趋势发布时间:2024-05-13 11:46:51来源:欧亚体育娱乐平台 作者:欧亚娱乐平台怎么样摘 要:针对液压四足机器人结构布局混乱、能量损失大及控制策略复杂等问题,从机器人整机、液压系统和控制策略3个角度分析了液压四足机器人的研究现状。首先,对各团队的机器人进行介绍,指出国内外的技术差距;然后,从动力来源、系统类型、液压回路和伺服执行元件4个方面对液压系统的主要两大构成分别阐述,着重介绍了以节能为目的的阀控系统和集成化、一体化的伺服执行器;接着概述了主流的几种控制策略,并分析各自的优缺点;最后,指出液压四足机器人的发展方向将集中在高速高压化、轻量化、节能降噪以及先进的控制算法,以实现液压四足机器人的高动态性能和行业应用。 《中国制造2025》把机器人技术作为十大重点支持领域之一,液压足式机器人是机器人技术的重要分支之一,由于液压伺服驱动具有功率密度高的优势,可以最大程度降低驱动系统在机器人本体中的质量占比,足式机器人依靠其落足点离散实现对地形的灵活适应性的优势,广泛应用于地形勘探、武器装备、物资运输等领域。随着液压驱动、增材制造、逆向工程和智能控制等技术的高速发展,在丛林和山地环境中仍能背负物资并实现较为快速的行进的高机动液压四足机器人成为新的研究热点。液压四足机器人如何学习动物的运动机理,实现大自然哺乳动物的运动模式,辅助人类在不能到达的复杂的作业环境和危害人身的区域开展作业,成为广大学者研究方向。 目前有关液压四足硬件本体的研究较少,研究主要集中在机器人步态控制和力柔顺控制方面。各团队搭建液压四足机器人时多采用工业领域现有的零部件进行集成设计,导致液压驱动系统功率密度指标远无法满足高机动液压足式机器人驱动与控制需求,缺少“高功率密度液压驱动动力单元”成为限制我国液压足式机器人技术进步的关键因素。本研究从机器人整机、液压执行元件和控制策略3个方面对国内外液压四足机器人的发展现状进行论述,并对创新设计和前沿技术展开介绍,最后结合新兴技术,总结了液压四足机器人未来的发展方向。 在液压四足机器人的发展史上,留下浓墨重彩一笔的当属波士顿动力公司Boston Dynamics,在Marc Raibert教授的带领下开始腿足式机器人的研究,先后开发了Bigdog、Alpha Dog、Legged Squad Support System(LS3)、Cheetah、Wildcat、Spot等机器人,在负载能力、奔跑速度、灵活性等方面均有突破。意大利科学技术研究院(IIT)的DLS实验室2007年从单腿机器人的研发开始,开发了HyQ、HyQ-blue、HyQ2Max、HyQReal等机器人,并成功实现四足拖动3 t的飞机。韩国KITECH团队在机器人结构上有诸多尝试,采用16个自由度仿马结构、前腿后轮等结构,相继开发了P2、qRT-1、qRT-2和Jinpoong等机器人。此外,日本的TITAN-Ⅺ机器人可以实现5.2 t的负载,自主跨越15的斜坡,在崎岖陡峭的地方实现作业辅助。
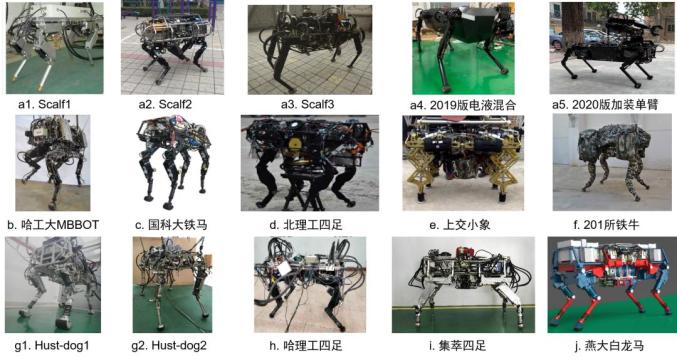
国内液压四足机器人的研究起步较晚,在863计划的支持下,山大、哈工大、国科大、北理工、上交大5个团队开始了液压四足的研究,取得了一定的研究成果。近年来,北方车辆所、华科、哈理工、江苏集萃、燕山大学等团队也加入了四足机器人的研究队伍。
作为驱动机器人的最基本单元,有关伺服执行器的结构创新和控制研究层出不穷,液压四足机器人每条腿的主动关节由2~4个伺服执行器驱动,其性能直接决定了机器人的负载能力和动态性能。 直线缸驱动是当下机器人最常用的方式,通过三角形连杆输出各关节扭矩,实现腿部各关节节律性摆动。波士顿动力、山东大学、国防科技大学、哈尔滨工业大学、北京理工大学、江苏集萃智能制造、韩国工业技术科学院等均采用液压缸本体集成伺服阀和传感器的方式,IIT和华科采用缸阀分离式设计,上交大、国科大结合机器人工况对执行元件进行了特殊的设计。此外,IIT联合MOOG公司,融合了增材制造、伺服阀、传感检测等功能于一身,实现了高度集成的智能液压执行器(ISA)的设计;山大、燕大实现了缸腿一体化关节的设计;浙江大学实现了碳纤维复合材料液压缸的设计制造。
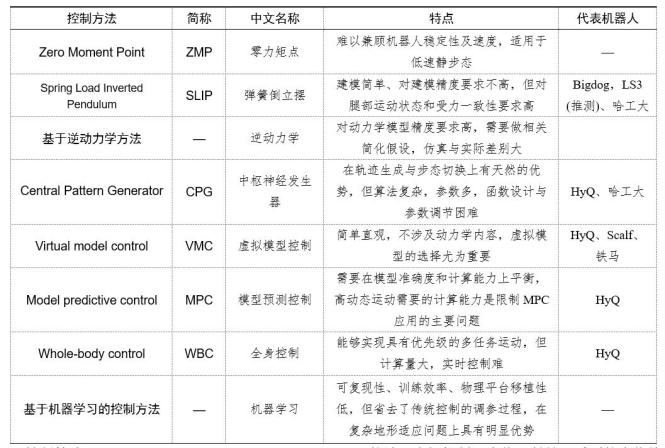
目前常用于液压四足的控制方法主要有CPG、VMC、MPC、WBC等,各种控制方法的介绍对比如下图:
当下,液压四足机器人承载着人们对伺服液压的期待,集中了高频响的伺服阀、低摩擦的伺服缸、智能控制算法等众多顶尖技术,实现简单的低速行走已经无法满足人们的期待,实现超越人类的高速奔跑和高爆发的运动能力成为必然趋势。但噪声大、能量转化率低、结构冗杂等问题始终制约着性能的进一步提升。新原理和新控制方法不断出现,将从以下方面提升液压四足机器人的各项性能: 相信在不久的将来,通过上下游相关产业的协同,结构上高集成,实现机器人极致轻量化;开发出高效的机载动力系统,配合先进的控制算法,保证环境适应性的同时,实现机器人高爆发输出、高动态性能。 先进机电液控制技术团队现有教师3人,其中教授1人,研究员1人,是浙江大学流体动力与机电系统国家重点实验室的重要组成部分,在读研究生30余名。团队主要研究方向包括机电系统集成及智能化、高功率密度液压传动、智能液压元件、液压足式机器人、低速大扭矩液压马达研发、电液比例/伺服控制元件及控制方法等。 徐兵,博士,教授,博士生导师,现任流体动力与机电系统国家重点实验室主任,机械电子工程系主任。 现任中国机械工程学会理事、中国机械工程学会流体传动与控制分会副主任委员及液压专业主任、中国机械工程学会机器人分会常务委员,中国液压气动与密封件工业协会专家委员会委员、中国工程机械学会特大型工程运输车辆分会副理事长、中国航空学会流体传动与控制专业委员会委员、全国液压气动标准化技术委员会液压分会副主任委员、ISO/TC131国际标准专家组成员、《液压与气动》编委会副主任兼第一届青年编委会主任等。 先后作为项目负责人获得973、863、国家科技支撑计划及国家自然科学基金等国家和省部级纵向课题20余项,研究成果已在《IEEE/ASME Transactions on Mechatronics》等国际刊物上发表SCI论文80余篇,EI论文80余篇(不含同时被SCI收录论文),申请发明专利50余项,已获授权国家发明专利40余项。荣获国家科技进步二等奖1项,省部级科技进步一等奖4项及二等奖1项。 张军辉,博士,研究员,博士生导师,国家优秀青年基金获得者,浙江大学“百人计划”研究员(自然科学B类),浙江大学流体动力与机电系统国家重点实验室副主任。2007年、2012年分别获浙江大学工学学士、工学博士学位(导师:杨华勇院士、徐兵教授)。 现任中国机械工程学会流体传动与控制分会委员及青年工作副主任,《Chinese Journal of Mechanical Engineering》编委,中国航空学会航空机电、人体与环境工程分会青年工作委员会委员,《液压与气动》第一届青年编委会副主任。 主要围绕航天航空飞行器及高动态液压足式机器人开展高功率密度液压驱动基础理论研究,以负责人身份承担国家自然科学基金3项,国防军工单位委托科研项目10余项,以技术骨干参与973课题1项、国家科技支撑计划2项、国家自然科学基金重点和重大项目各1项等。研究成果已在机电领域国际刊物上录用发表SCI论文60余篇,其中第一/通讯作者40余篇,获得2015年中国机械工程学会优秀论文奖1篇,2017年第二届中国科协优秀科技论文奖1篇,国际会议最佳论文奖3篇,授权发明专利30余项。获得中国机械工业科学技术奖一等奖2项(分别为二作和五作),高等学校科学研究优秀成果奖(科学技术)二等奖1项(二作)。 纵怀志,浙江大学机械电子工程专业在读博士生,先进机电液控制团队四足机器人组组长。2017年、2020年分别获东北大学工学学士、浙江大学工学硕士学位(导师:徐兵教授)。
主要围绕高功率密度液压驱动开展足式机器人节能控制策略、液压元件轻量化设计(碳纤维液压缸、蓄能器、大功重比摆动缸)、新型液压执行器和散热系统的开发等方面的科研工作。 发表论文5篇(最佳会议论文1篇),专利3项。获得全国大学生机器人大赛一等奖3次,省优秀毕业生、市优秀大学生等荣誉30余项。 |